")







Особенности:
- Грузоподъемность роботов до 10 кг, различные диапазоны досягаемости (600 мм, 700 мм и 800 мм).
- Высокая скорость, точность и стабильность.
- Адаптивное ускорение для продления срока службы робота и обеспечения более эффективного движения по любой траектории.
- Встроенный сетевой кабель для удобства подключения камеры.
- Использование высокоскоростных двигателей для повышения скорости работы.
- Модульный дизайн, позволяющий удовлетворить индивидуальные потребности клиентов.
| Технические характеристики робота | |||
|---|---|---|---|
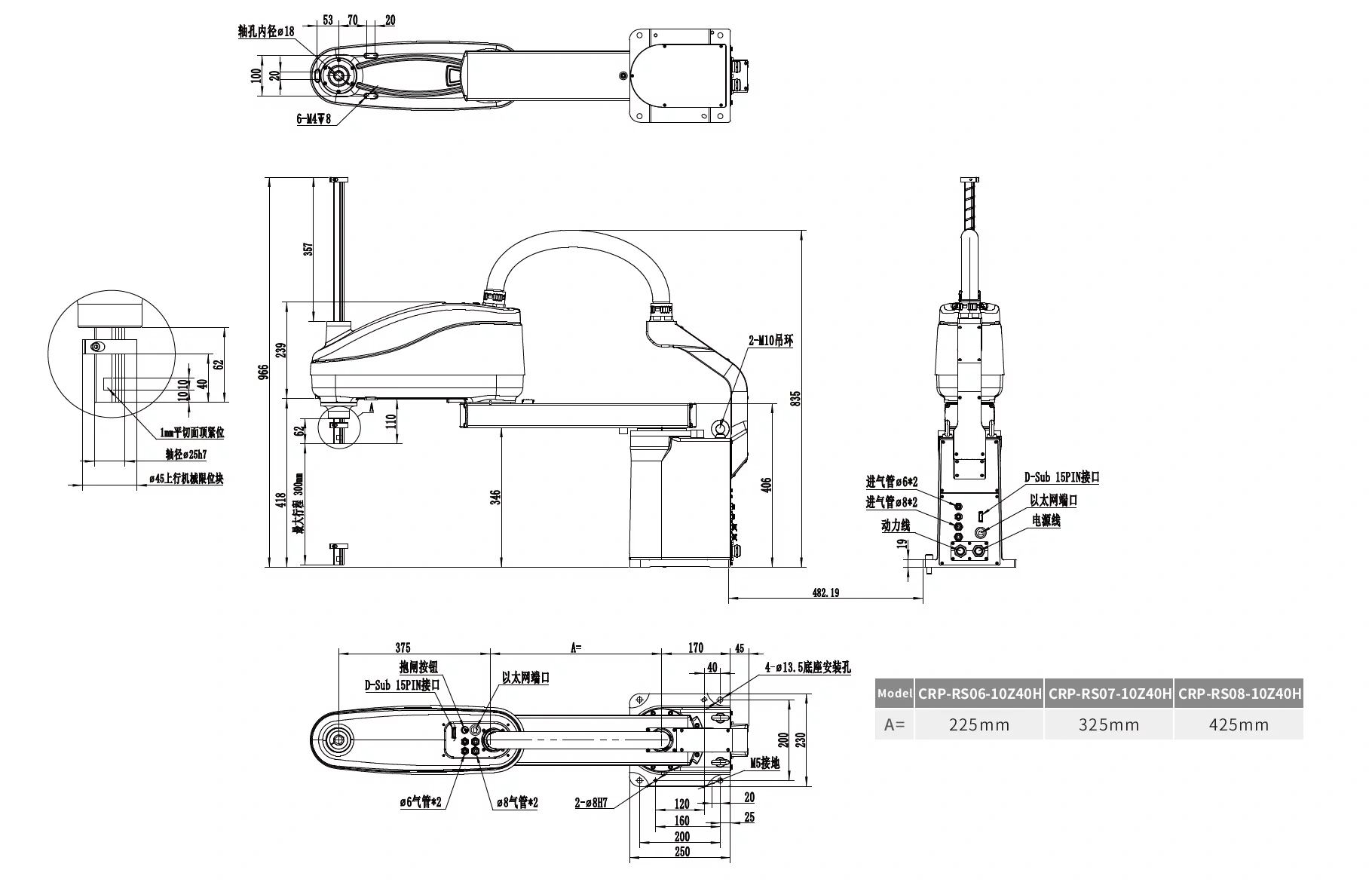
| Модель | CRP-RS06-10Z30H/40H | CRP-RS07-10Z30H/40H | CRP-RS08-10Z30H/40H |
| Степень подвижности | 4 оси | 4 оси | 4 оси |
| Способ крепления | К поверхности пола | К поверхности пола | К поверхности пола |
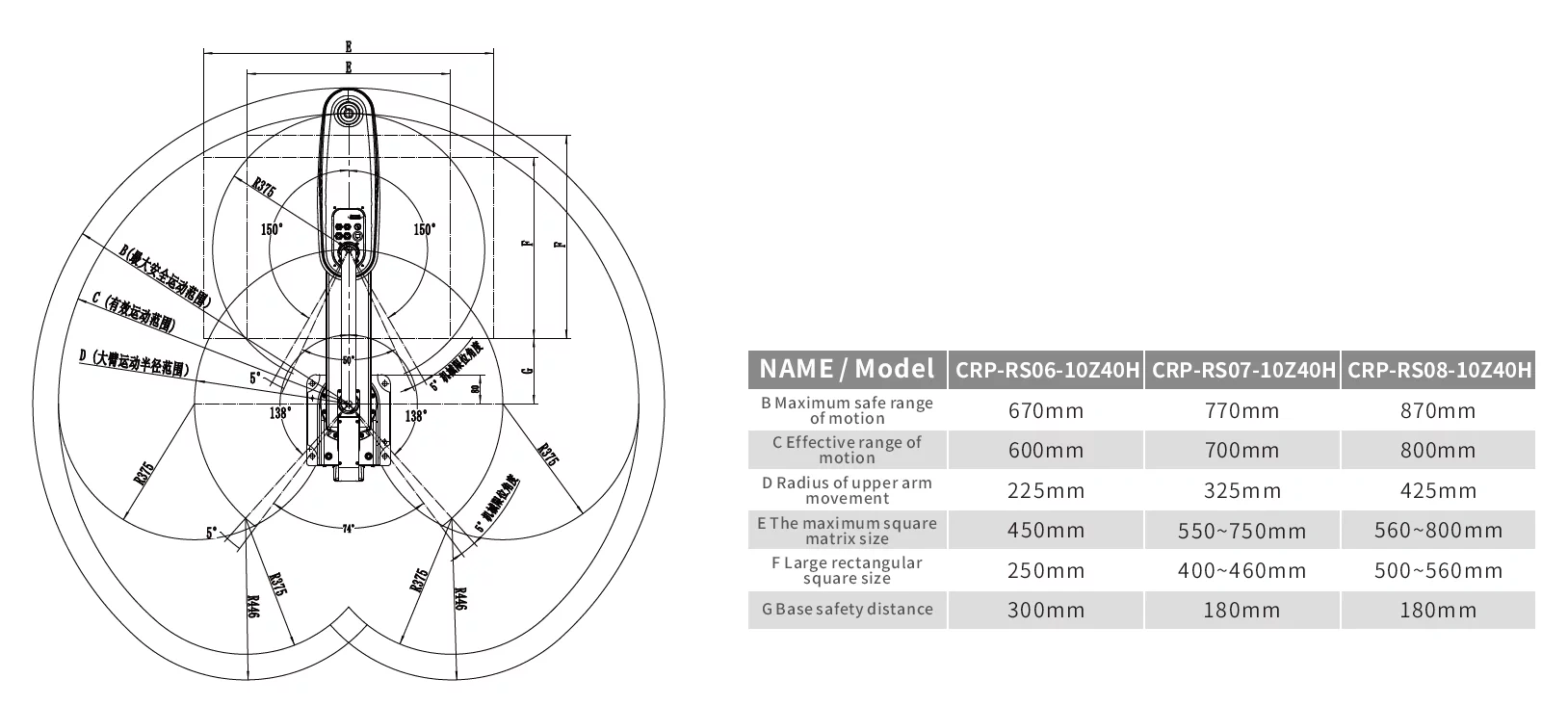
| Максимальный охват | 600 мм | 700 мм | 800 мм |
| Ход оси Z | 300 мм / 400 мм | 300 мм / 400 мм | 300 мм / 400 мм |
| Номинальная нагрузка | 5 кг | 5 кг | 5 кг |
| Максимальная нагрузка | 10 кг | 10 кг | 10 кг |
| Время цикла | 0.48 с | 0.48 с | 0.48 с |
| Макс. скорость движения по осям | |||
| J1 + J2 | 9000 мм/секунду | 9700 мм/секунду | 10500 мм/секунду |
| J3 | 1100 мм/секунду | 1100 мм/секунду | 1100 мм/секунду |
| J4 | 2600°/секунду | 2600°/секунду | 2600°/секунду |
| Диапазон движения по осям | |||
| J1 | -138°~138° | -138°~138° | -138°~138° |
| J2 | -150°~150° | -150°~150° | -150°~150° |
| J3 | 300/400 мм | 300/400 мм | 300/400 мм |
| J4 | -360°~360° | -360°~360° | -360°~360° |
| Точность повторного позиционирования | |||
| J1 + J2 | ±0.025 мм | ±0.025 мм | ±0.025 мм |
| J3 | ±0.01 мм | ±0.01 мм | ±0.01 мм |
| J4 | ±0.01° | ±0.01° | ±0.01° |
| Номин./макс. момент инерции | 0.02 кг·м² / 0.25 кг·м² | 0.02 кг·м² / 0.25 кг·м² | 0.02 кг·м² / 0.25 кг·м² |
| Вес робота | 36 кг | 37 кг | 38 кг |
| Требования к условиям использования: | |||
| Средняя температура | 0-40°C | 0-40°C | 0-40°C |
| Относительная влажность | 20-80% (без конденсата) | 20-80% (без конденсата) | 20-80% (без конденсата) |
Диапазон движения
Размеры робота